
- ・EtherCAT対応。最大64軸を0.5ms周期で同時制御可能なハイパフォーマンス
- ・C言語(C/C++)、.NET(C#, VB)対応の500種類以上のモーション・通信API
- ・市販のWindows PCとLANケーブルだけでサーボドライバ、I/O接続
- ・世界各地の半導体製造工場で量産ラインに採用されている信頼性
WMX2の特徴
- ・専用ボード、ハードウェア、専用ケーブルは不要
- ・Windows標準インストーラからソフトウェア、リアルタイムOS等全てインストールが可能
- ・独自EtherCATマスタにより、64軸を同時制御をPCのLANポート接続で実現
- ・500種類以上のAPIで、独自モーションコントローラ開発をサポート
- ・APIライブラリは最大256スレッドに対応
- ・EtherCATマスタ、リアルタイムOS(RTX)が標準で付属。
- ・EtherCATのネットワーク構成や装置セットアップをサポートする強力なツールが標準付属
用途
- ・半導体製造装置
- ・搬送ロボット
- ・検査装置
- ・チップマウンター
- ・キネティックアート
- ・ボンディングマシン
- ・資材ハンドリングマシン
- ・穴あけ、レーザーカッティング
WMX2 – 仕様
| 同時制御軸数 | 最大64軸 同時・同期制御 |
|---|---|
| I/O 点数 | 入出力それぞれ約6KB |
| モーション機能 | ジョグ、原点復帰、位置決め、リストモーション(連続位置決め)、APIバッファ、イベント駆動、電子カム、連続軌跡(直線・円弧/スプライン)、位置同期出力、周速一定制御 |
| 補間機能 | 直線(最大64軸), 円弧(2次元、3次元)、ヘリカル |
| 加減速プロファイル | 台形, S字, ジャーク(加加速度指定/ジャーク比指定)、時間指定、正弦波形加速度、放物線形加速度 以上を加速、減速別々に設定 その他:2段階速度プロファイル、PVT指定プロファイル |
| 原点復帰機能 | 19種類、ガントリ軸対応、カスタム原点復帰 |
| オーバーライド機能 | 位置決め途中で目標値、速度、加減速度、プロファイルを変更 |
| 同期機能 | 単純同期、ガントリ向け同期ズレ補正機能(完全同期制御) |
| 指令モード | 位置、速度、トルク |
| 補正機能 | ピッチエラー補正(1次元/2次元)、バックラッシュ補正、真直度補正 |
| EtherCAT マスタ | 機能:CoE、FoE、DC同期、ライン/スター/リングトポロジー、ホットコネクト 最小通信サイクル:0.125ms ※PCスペック、軸数による |
| スレッド数 | 256個のスレッド及びプロセスから同時呼び出し可能 |
| APIライブラリ対応言語 | C/C++言語(ネイティブ) .NET対応言語(C#、VB等) 対応 .NET Framework:2.0~3.5 |
| 開発環境 | Visual Studio 2008、2010、2012、2013、2015 C++ Builder XE7 |
| 動作環境 | OS:Windows 7(32bit/64bit)、Windows 10(64bit) .NET Framework:4.5.1以降 CPU:最低ATOM 2GHz 程度(E3845等) コア数2以上 メモリ:4GB以上推奨 |
EtherCATネットワーク構成ツール
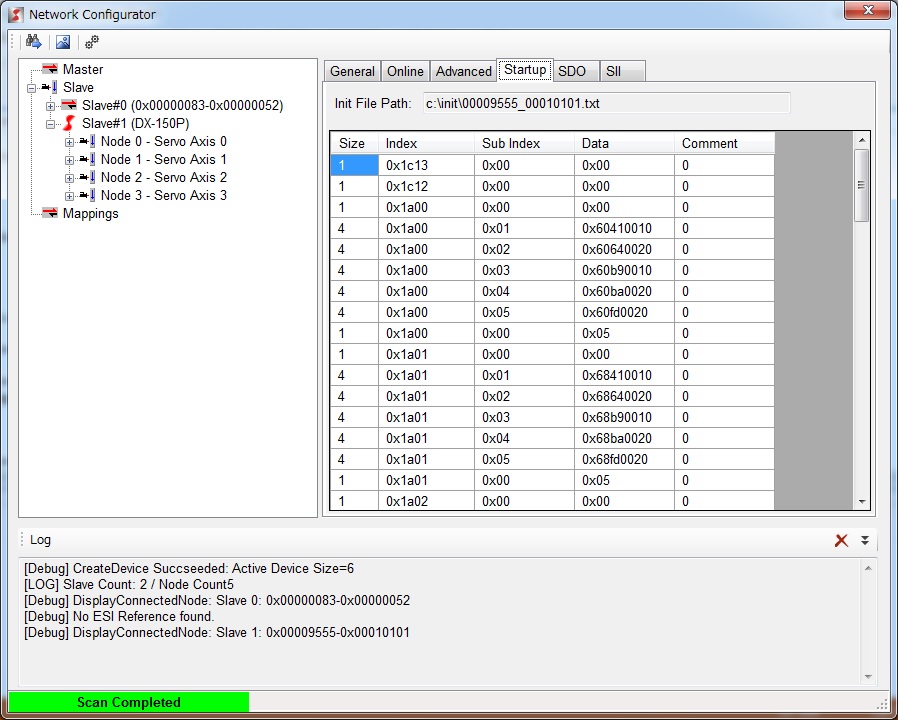
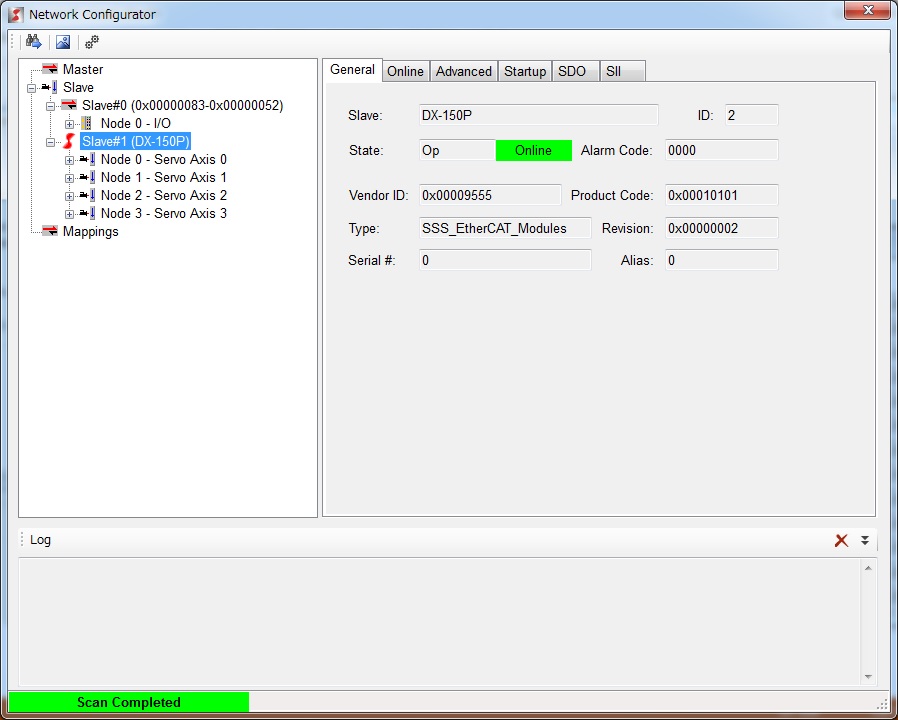
EtherCATネットワークの構成に必要な機能を一つにまとめたトータルサポートツール
- ・直感的で使いやすいGUI
- ・EtherCATのプロセスデータや各スレーブのオブジェクトの確認
- ・選択式のスレーブオブジェクトマッピング定義ファイル(init file)作成機能
- ・ネットワーク定義ファイルの作成、編集と読み込みが可能
- ・EtherCATの通信エラーカウンタチェック機能によるネットワークエラー解析機能